- Published on
you only live... wait... look once (YOLO) Object Detection
- Authors
- Name
- Qi Wang


Overview
Table of Contents
Introduction
We can look at an image and instantly segment out the individual objects and their locations. Unfortunately, computers have a hard time doing this. Until YOLO was released in 2015, the state-of-art object detection algorithms were primarily models that used classifiers which were ran on different parts of the image to generate the bounding box (DPM), using image segmentation then running a classifer through the segmented areas (Selective Search), or with a Regional Proposal Network which proposes the bounding boxes and then runs a classifer on these boxes. These models all have one common similarity, which is that they evaluate parts of the image many many times making it very slow and not fit for realtime inferencing.
Enters YOLO (You Only Look Once) 😎
YOLO
Just like the name suggests, YOLO takes the entire image and outputs the bounding boxes, allowing it to be fast and accurate enough for little latency in realtime inferencing. So how does this work?? The paper is attached for anyone interested.
Let's Split the image


From YOLO Paper Above
As stated in the paper above, the idea of YOLO is to simplify the problem into simple regression which can be done with just a CNN. To do this, we split the image into a grid, where each grid cell is responsible for predicting bounding boxes. A bounding box is defined by a few parameters, how confident that there is an object in this grid and how accurately the box predicts it, the position of the bounding box, and its for width and height. Below is a vector visualization:
Therefore, the output of this network is . represents the number of possible classes in the image, and it represents probabilities of the object in the drawn bounding box being of that respective class. You might notice a possible problem with this approach: what if there are two different objects in the same grid cell? We will cover the solution to this later in this blog post. Improvements were made which led to YoloV2.
I won't go over the specific CNN architecture that they used for this (described in the paper above), but the main idea is to generate this matrix and prune the predictions from there.
Eliminating Overlapping Bounding Boxes

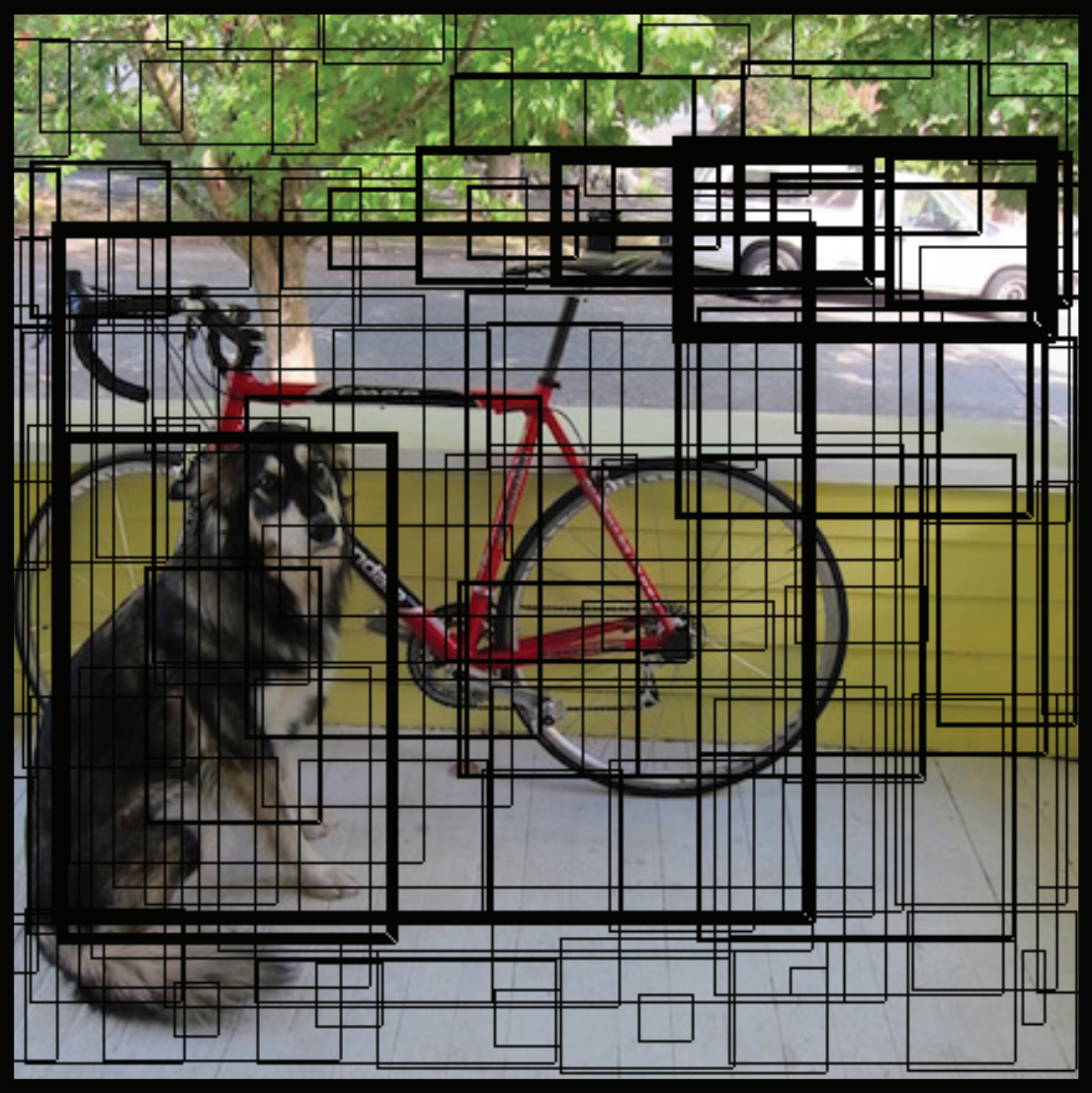
From YOLO Paper Above
So... what about all these boxes?!?! We only want three of them!
A method that WON'T work
The model predicts the confidence of each bounding box, so why don't we just take the max confidence and discard every other box drawn! This seems like a great idea, but... it is WRONG. What if the image had two different objects of the same class in different locations? This method completely ignores multiple objects of the same class, so we will need a new solution.
A method that WILL work
First let's introduce a metric called IOU (intersection over union). The IOU of two bounding boxes is their intersection area divided by the union of their total area.
We use this metric to see whether the two bounding boxes given is refering to that same object on screen. A high indicates that the boxes are overlapping and vise versa. So instead of taking the max confidence out of every bounding box, we can have a threshold such as , and take the max confidence of boxes that are overlapping, determined by the threshold. This process is called non max suppression, and after processing the predicted boxes, we are left with the final detections.
Problem...
So back to the problem of multiple objects of different classes in that same cell... What can be done?? Firstly, if the grid cells are small enough, then this problem is basically non existent. However, this dramatically increases the amount of computations and doesn't really solve the issue because decreasing the grid cell size could decrease performance with objects of different sizes and aspect ratios.
In YOLOv2, the authors proposed the use of anchor boxes. Anchor boxes are a set of predefined boxes that have a certain width and height that you assign based on the objects that you will be detecting. Then instead of predicting the location and size of bounding boxes, the YOLOv2 network predicts the offsets from the predefined anchor boxes. This helps solve the first problem of objects of different sizes and aspect ratios. However, we still need to fix the problem where there are multiple object classes in a grid.
The YOLOv2 authors suggested a simple fix:
When we move to anchor boxes we also decouple the class prediction mechanism from the spatial location and instead predict class and objectness for every anchor box.
We simply predict anchor boxes with their own class probabilities, which fixes this issue. The prediction vector for one cell would look like this (assume there are only 2 classes):
Based on the dataset you are working with, you can define how many anchor boxes to predict and this solves the issue seen in YOLOv1.
Conclusion
So this is essentially how the YOLO network works. If you are curious about the performance of this model compared to others, they are included in the paper attached above. In the upcoming posts, I might demonstrate how you can set up your own YOLO model and use it for your custom case. See y'all next time!